EtherCATは、2003年に、独ベッコフオートメーションによって開発されたEthernetベースのフィールドバスです。メンバ数は約5,000社(2018年9月時点)を超える世界最大のフィールドバス団体になります。マスタの仕様が完全にオープンになっている事もあり数百社がマスタを実装していて、スレーブで使用するEtherCAT通信チップは10社以上の半導体メーカから供給されています。マスタのハードウェアはソフトウェアで機能を実装するのが一般的です。一方、スレーブの通信HWはEtherCATスレーブコントローラ(ESC)という専用のASICで構成されています。
EtherCATの特徴・メリット
EtherCATの特徴は、効率的な通信方式による「高速通信」と「高精度同期」です。効率的な通信は、一度のトランザクションで接続する全ての機器に対して出力指示を出し、入力情報を取得する仕組みによるものです。
また、下記の様に他のフィールドバスとの互換性を実現しています。
- CANopen over EtherCAT(CoE)
EtherCATはCANopen®規格 EN 50325-4と同等の通信メカニズムを提供しているので、CANopenのプロファイル定義デバイスのアプリケーションをEtherCATデバイスとして実装可能 - Ethernet over EtherCAT(EoE)
EtherCATは物理層がイーサネットで、イーサネットフレームを使用しているので、あらゆるイーサネットデータをEtherCATセグメントを経由して送信する事が可能 - Modular Device Profile(MDP)
旧フィールドバス接続を橋渡しすることでPROFIBUS、DeviceNetなどの初期フィールドバスシステムを再利用する事が可能
EtherCATの通信仕様
EtherCATの通信仕様は以下になります。
| 項目 | 仕様 |
|---|---|
| 伝送種類 | 100BASE-TX |
| 伝送速度 | 全二重100Mbps |
| 通信距離 | ノード間距離 100メートル以内 |
| 伝送ケーブル | STPケーブル カテゴリ5/5e |
| トポロジ | スター、ライン、ツリー |
| 最大接続台数 | 65535 |
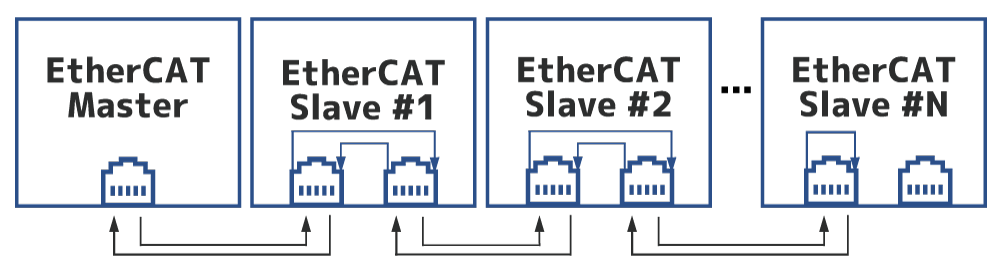
EtherCATの機能原理
EtherCATのネットワークはマスターとスレーブで構成され、プロセスデータをIEEE802.3標準イーサネットフレームに載せて通信します。また、通信方式には「on the fly」方式が採用されており、一度の通信で接続されている全てのスレーブ機器に対して出力指示を出し、入力情報を取得できます。このため、ネットワーク内に送られるパケット数が少なくてすみ、効率的な通信を実現しています。
また、通信パケットに含まれるDC(ディストリビュートクロック)により、同期スレーブ間の高精度な時刻同期が可能で、複数スレーブによる軸間同期精度は1μs以下に収まります。
EtherCAT/Masterの実現方法
EtherCAT/Masterの実現方法は2つあります。
- EtherCAT/Masterスタックを用いた方法
- EtherCAT/Master IPを用いた方法
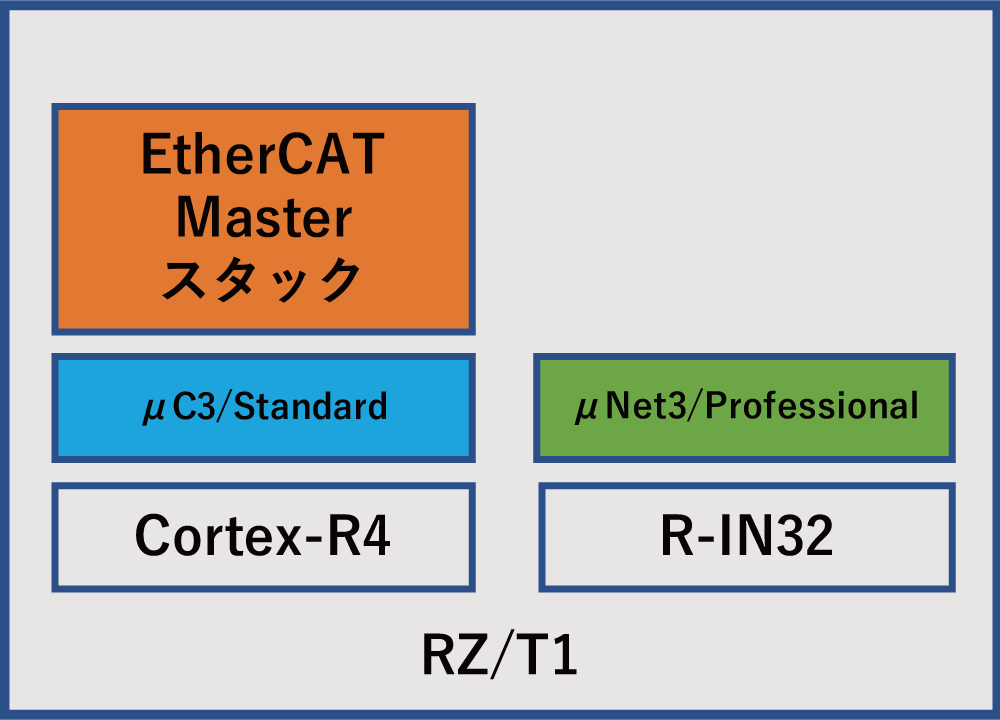
1.EtherCAT/Masterスタックを用いた方法
Acontis社のEtherCAT/MasterスタックをμC3上に実装して実現する方法です。JSLテクノロジー社から技術サポートを受ける事ができます。ルネサス社のRZ/T1(600MHz@Cortex-R4)やそれ以上のスペックのプロセッサでの実現が多く見られます。
JSLテクノロジー社が提供する「EtherCATマスター“テクニカルサポート”」の詳細は下記をご覧ください。
EtherCATマスター“テクニカルサポート”の詳細はコチラ
EtherCATのサポートベンダ
| サポートベンダ | 提供サービス |
|---|---|
| アコンティステクノロジーズジャパン | ライセンス (代理店:株式会社マクニカなど) |
| JSLテクノロジー株式会社 | SW開発、技術サポート |
EtherCATの採用事例:リコーインダストリアルソリューションズ株式会社
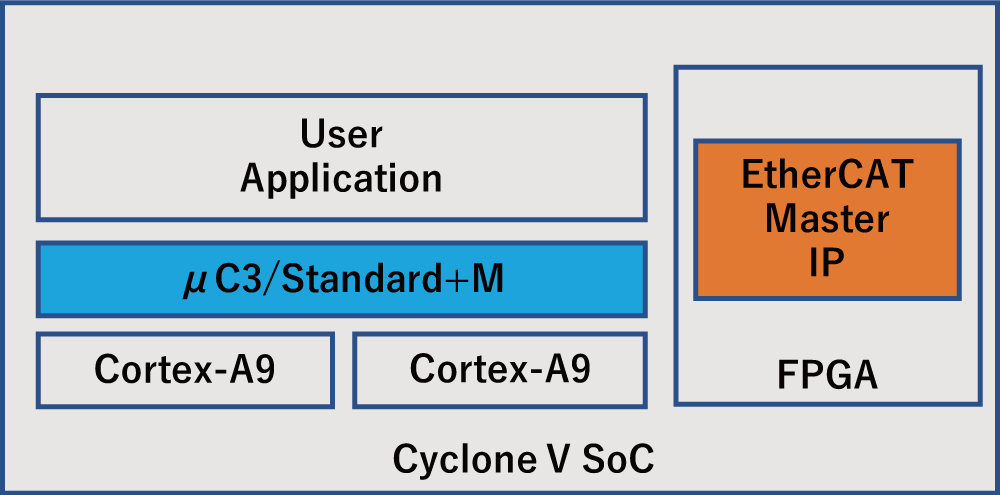
2.EtherCAT/Master IPを用いた方法
EtherCAT/Master IPをFPGAに実装して実現する方法です。NDR社が高性能SoC FPGA用のEtherCAT/Master IPを提供しています。インテル社やザイリンクス社のSoCで使用できます。
また、CPU側にμC3が使用されているSDKも用意されています。
EtherCAT/Slaveの実現方法
続いて、EtherCAT/Slaveの実現方法を紹介します。
EtherCATのスレーブ側は以下のようなデバイスで実現する事ができます。
- ルネサス社のRX72M
- TI社のAMIC110
- インフィニオン社のXMC48000
など
JSLテクノロジー社から各CPU向けのSDKが用意されています。
EtherCAT/MasterとμC3を組み合わせてできること
μC3/μNet3はFA市場で多くの実績があり、様々な産業用イーサネットプロトコルとの組合せを容易に実現できます。安心してEtherCAT/Master製品を開発できるだけでなく、マルチプロトコル対応やネットワーク全般のご相談をお受け致します。
また、μC3をベースにしたSDKが既に用意されていますので、直ぐにEtherCAT/Masterの評価を行う事ができます。要求仕様に対する必要なCPU性能やメモリ容量など、開発に必要な項目を短期間で確認し、スムーズに製品開発のスタートを切る事ができます。
資料
詳細をご希望の方は、下記よりプロダクトガイドをダウンロードしてください。
ご不明な点がございましたら、下記よりお気軽にお問い合わせください。
- SDKの入手方法を教えて下さい
- 詳しい話を聞かせて下さい
- サポートベンダを紹介して下さい
- μC3が未対応のプロセッサの場合、ポーティングはお願いできますか?
など